論点解説
ドローンの飛行原理|揚力・抗力・推力とピッチ・ロール・ヨー
ドローン(無人航空機)の飛行原理を理解することは、学科試験だけでなく安全運航の土台になります。揚力・抗力・推力の3つの力、姿勢を表すピッチ・ロール・ヨー、失速や反トルクといった重要概念を、教則に沿って整理します。
飛行に必要な3つの力
無人航空機が飛行するためには、重力に対抗する上向きの力を必要とします。機体種類によって力の生み出し方が異なります。
飛行機
主翼に発生する揚力で重力に対抗します。飛行速度と逆向きに空気抵抗である抗力が働くため、これに抗するために回転翼であるプロペラ等による推力が必要です。
回転翼航空機(ヘリコプター・マルチローター)
重力に対抗する上向きの力はプロペラ(ローター)による推力によって生み出されます。機体が運動すると抗力も作用しますが、推力の大きさを重力以上にし、機体姿勢を変化させてこれに抗します。
根拠:教則 4.3
揚力発生の特徴
流れる空気の中に翼のような流線形をした物体が置かれると物体には空気力が作用し、流れと垂直方向に作用する力を揚力、流れの方向に働く力を抗力とよびます。
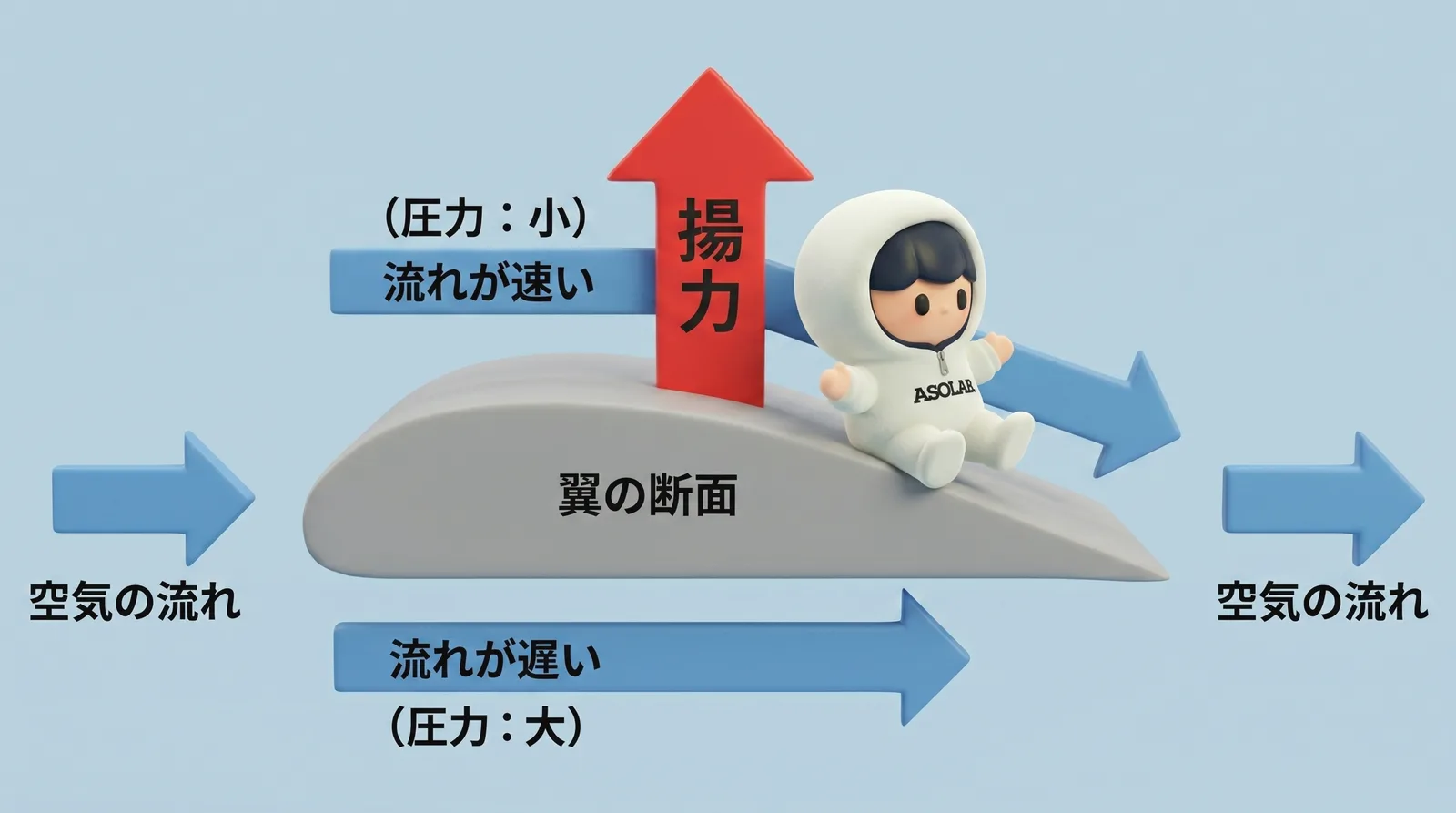
- ◆翼の前縁と後縁を結ぶ翼弦と流れのなす角を迎角といい、空気が下方から流入する時に迎角は正
- ◆一般に迎角が増すと揚力・抗力ともに増加
- ◆翼の断面形状が上面の湾曲が下面より大きな翼型は、効率よく揚力を発生できる
- ◆あまり大きな迎角にすると、流れは翼の表面から剥離し、揚力は減じ、抗力が増大し、失速を招く
根拠:教則 4.3
迎角と横滑り角
飛行中の航空機に流入する空気の機体に対する角度は迎角と横滑り角で表されます。機体の前後・上下を含む面に空気流入の向きを投影したときに、前後軸とのなす角を迎角といい、下方から空気が流入するときに迎角は正です。機体の前後・上下を含む面と空気流入の向きの面のなす角を横滑り角といい、機体右側から空気流入するときに横滑り角は正です。機体に作用する揚力・抗力などの空気力、モーメントは流入空気の速さとともに、迎角・横滑り角で決まります。
根拠:教則 4.3
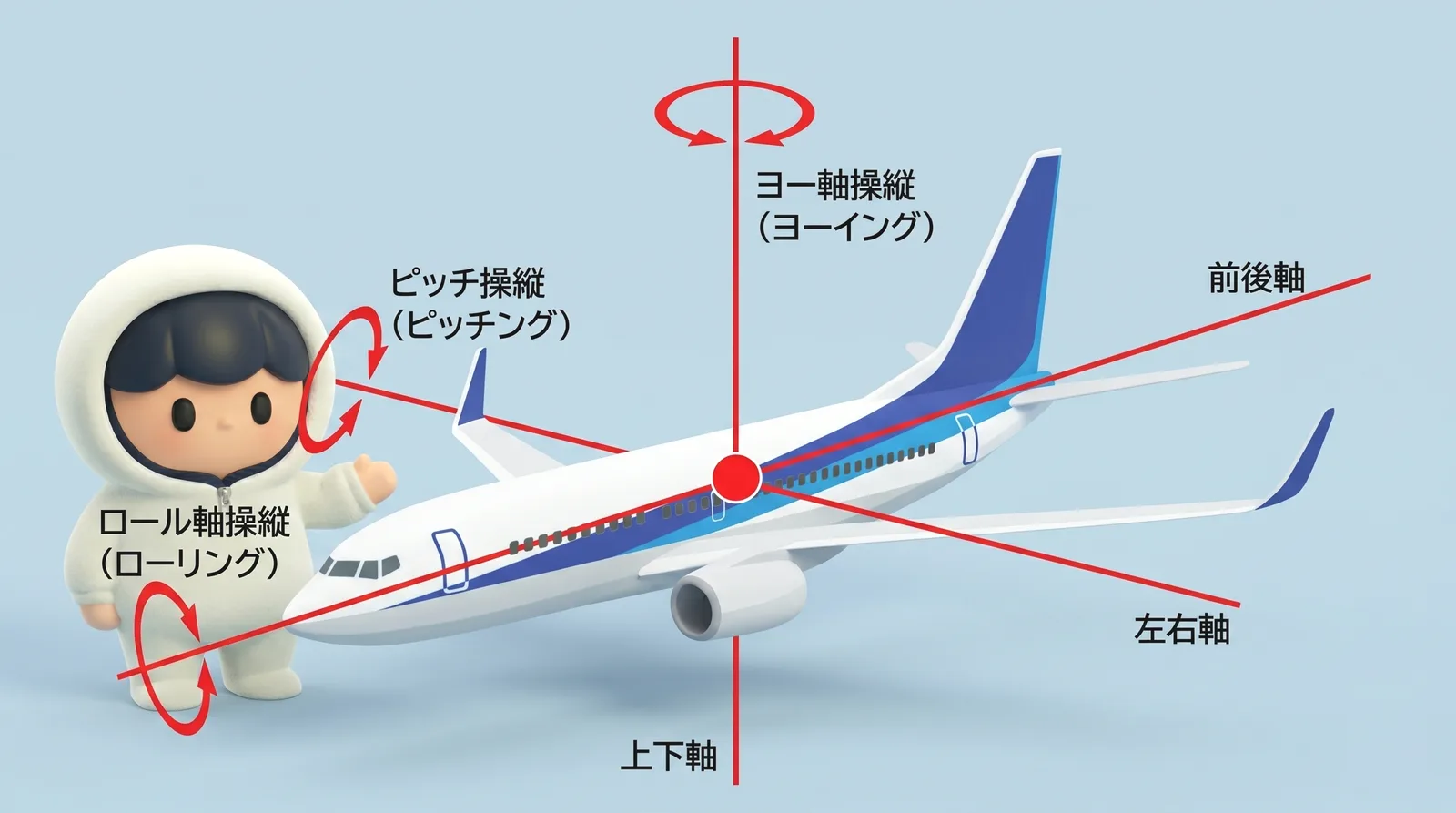
機体姿勢:ピッチ・ロール・ヨー
航空機の姿勢は3軸の回転で表現されます。
| 軸 | 回転の内容 | 角・角速度 |
|---|---|---|
| ピッチ | 機首を上げ下げする回転 | ピッチ角/ピッチ角速度(ピッチング) |
| ロール | 機体を左右に傾ける回転 | ロール角(バンク角)/ロール角速度(ローリング) |
| ヨー | 機体を上から見たときの機首の左右の回転 | ヨー角(方位角)/ヨー角速度(ヨーイング) |
根拠:教則 4.3
飛行機の舵と姿勢制御
飛行機はプロペラによる推力によって速さを制御し、ピッチ・ロール・ヨーの姿勢を変化させることで飛行速度の向きを制御します。舵の種類は次のとおりです。
- ◆エレベーター(昇降舵):ピッチを変化させる舵、水平尾翼にある
- ◆エルロン(補助翼):ロールを変化させる舵、主翼にある
- ◆ラダー(方向舵):ヨーを変化させる舵、垂直尾翼にある
根拠:教則 4.3
プロペラと反トルク
プロペラは2枚以上のブレードとよばれる翼が回転して推力を発生します。プロペラの回転にはトルクが必要であり、プロペラを回転させる原動機には反トルクが作用します。この反トルクの扱い方が機体種類ごとに異なります。

マルチローター
プロペラからの反トルクを相殺するために、偶数個のプロペラを半数ずつ異なる向きに回転させるのが一般的です。各プロペラの回転数を変化させ、推力とトルクを変化させてピッチ・ロール・ヨーの運動を行います。
ヘリコプター
一般的に、メインローターの反トルクをテールローターで相殺します。メインローターは1回転する間にブレードのピッチ角を周期的に変化させる可変ピッチ機構を持ち、これによって機体のピッチ・ロールの姿勢制御を行い、テールローターの推力を変化させてヨーの姿勢制御を行います。
根拠:教則 4.3
飛行性能〔一等〕
カテゴリーⅢ飛行を行うにあたっては、無人航空機の飛行性能(離陸性能・上昇性能・加速性能・巡行性能・旋回性能・降下性能・着陸性能等)およびこれに影響を与える要因(機体重量、飛行速度、空気密度や風などの大気状態等)について理解することが必要となります。また、機体重量、揚力、推力、空気密度、飛行速度、高度、回転翼の回転角速度の関係等の基本的な計算を理解しておく必要があります。
根拠:教則 4.3〔一等〕
よくある質問
Q揚力・抗力・推力の役割の違いは?
▾
揚力は重力に対抗する上向きの力(飛行機では主翼、回転翼航空機ではローターで発生)、抗力は飛行速度と逆向きに働く空気抵抗、推力は抗力に抗してプロペラ・ローターで生み出す前進または上昇の力です。これらが釣り合ったとき、機体は一定の速度と姿勢で定常飛行します。
Q迎角が大きいほど揚力は増えるのですか?
▾
一般に迎角が増すと揚力・抗力ともに増加しますが、あまり大きな迎角にすると流れが翼の表面から剥離し、揚力は減じ、抗力が増大して失速を招きます。失速状態では機体は急降下を始めます。
Qピッチ・ロール・ヨーはそれぞれどの軸の回転ですか?
▾
ピッチは機首を上げ下げする回転(機体の左右を軸とした回転)、ロールは機体を左右に傾ける回転(機体の前後を軸とした回転)、ヨーは機体を上から見たときの機首の左右の回転(機体の上下を軸とした回転)です。
Qマルチローターで反トルクを相殺する仕組みは?
▾
マルチローターはプロペラからの反トルクを相殺するため、偶数個のプロペラを半数ずつ異なる向き(時計回転/反時計回転)に回転させるのが一般的です。各プロペラの回転数を変化させることで推力とトルクを変え、ピッチ・ロール・ヨーの運動を行います。
Qヘリコプターはどう姿勢制御していますか?
▾
メインローターは1回転する間にブレードのピッチ角を周期的に変化させる可変ピッチ機構を持ち、これによって機体のピッチ・ロールの姿勢制御を行います。ヨーはテールローターの推力を変化させて制御します。
ドロスタの問題演習で定着させる
読むだけでなく、教則準拠の一問一答アプリ「ドロスタ」で問題を解くと、知識が試験で使える形で身につきます。無料で始められます。
関連する解説
出典:国土交通省「無人航空機の飛行の安全に関する教則(令和8年7月7日第5版)」を根拠に記述しています。最新・正確な情報は同教則および公式サイトをご確認ください。